The French Région Pays de la Loire project RobEcolo:
Design and Control of Wooden Robots
Project type:
Funded by the French Région Pays de la Loire and the Ecole Centrale of NantesFunding:
260,000 EurosAlso supported by:
the EMC2 French cluster for competitiveness.Project webpage:
http://robecolo.irccyn.ec-nantes.fr/Objectives of the RobEcolo project
Why a project on the design of an industrial wooden robot? You may believe that this idea is crazy? However, this idea comes from the actual context of climate change. The Climate Change Mitigation (CCM) has become a priority in Europe. To deal with this huge challenge, the European Council adopted new environmental targets for EU in 2008, the so-called “20-20-20 targets”, in which the first two targets are:
- To reduce emissions of Greenhouse Gases by 20% by 2020, and
- To increase energy efficiency to save 20% energy consumption by 2020 (40% and 27 % by 2030, resp.).
Such targets cannot be achieved without the collaboration of Governments and Industry. However, with the financial crisis, Industry is faced with its survival with respect to (wrt) the low cost countries. Thus, Industry must (i) innovate, (ii) robotize its processes to avoid relocation / reinforce the reshoring trend.
In 2014, the robot world operational stock was about 1,500,000 units A recent study shows that at least 6.107 kWh of energy is consumed per year to operate the robots while at least 1,500,000 T of raw materials (whose stock on Earth is limited and whose extraction / processing is polluting) have been used to build them. For the manufacturing of the robot worldwide stock, the equivalent of 11,000,000 T of CO2 has been released in the atmosphere. So, the use of current robots goes against CCM.
The main objective of RobEcolo is to propose innovative design methodologies leading to new robots with a drastically reduced EI (in terms of Greenhouse Gas emission during the robot manufacturing phase).
Introduction
We usually believe that the environmental impact of a machine is mainly due to its use, and not due to its design / manufacture. However, a recent study [1] performed in order to characterize the environmental impact of an industrial robot has shown that more that 60 % of the greenhouse gas emitted during the total life cycle of this machine were emitted during the manufacturing / design phase (Fig. 1 - this ratio does not take into account the industrial process for which the robot is used).
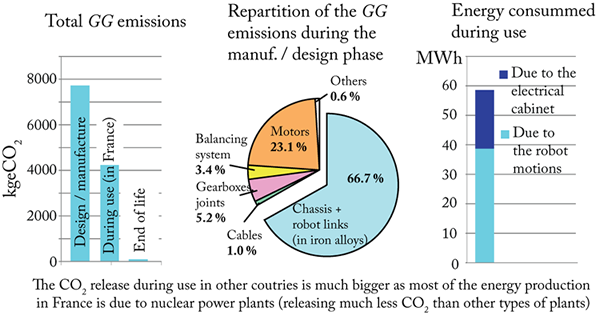
Fig. 1. Environmental impact of a Kuka KR 270 robot during its total life cycle (manufacturing + use during 12 years) / Energy consummed during the use phase (data from [1]).
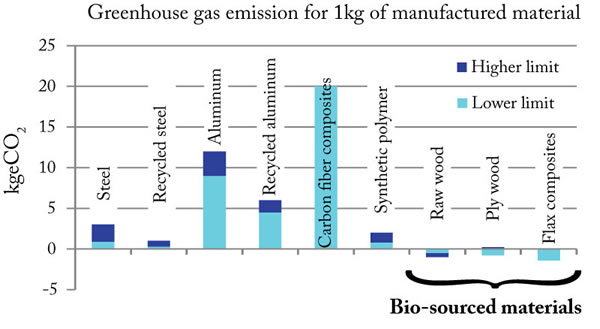
Fig. 2. Greenhouse gas emitted for the production of several materials (equivalence measured in kg of CO2 – data taken in [2]).
Up to now, the designer of an industrial robot does not consider the environmental impact when designing a robot. Thus, he uses usual materials (aluminum / iron alloys, carbon composites) which are extremely polluting (Fig. 2). The idea of RobEcolo is to design a wooden industrial robot, as wood has a negative environmental impact. The use of wood for designing machines is not a new idea. Wood was used in the past for designing machines (e.g. the Jacquard loom in the 19th century, or most of the airplanes before World War II) but was progressively replaced by metallic (and later the carbon composite) materials. However it is still used for the design of buildings due to its high payload-to-weight ratio and its low cost. Nowadays, designing machines with wood is limited to mock-ups (Fig. 3), prototyping (Fig. 4) or entertainment (Fig. 5). It is also used in machines in which wooden elements do not impact the accuracy, e.g. chassis of cars (cf. Morgan car manufacturer).
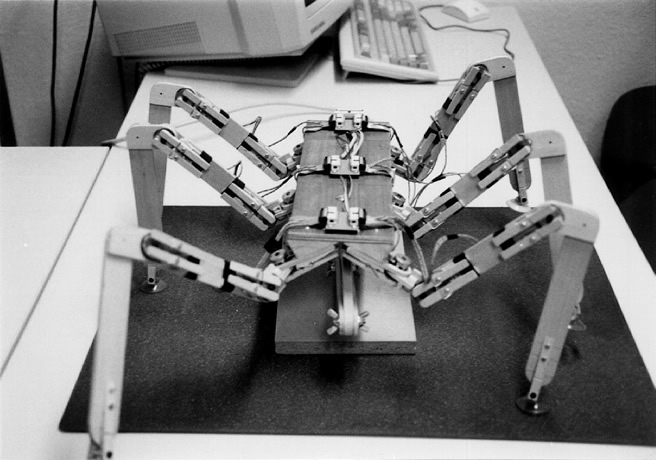
Fig. 3. Wooden mock-up of a walking robot [3].
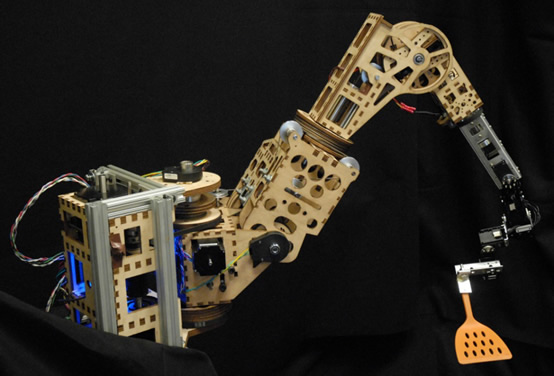
(a) Prototype of the Stanford OpenArm robot [4].

(b) The Willow-Garage PR1 robot [5].
Fig. 4. Examples of robot prototypes made with wood: for these robots, wood was used as a prototyping purpose (due to its low cost) or on parts that were not used to ensure the structural stiffness and overall accuracy.

Fig. 6. The elephant (animatronics) of the Machines de L'Isle Museum of Nantes.
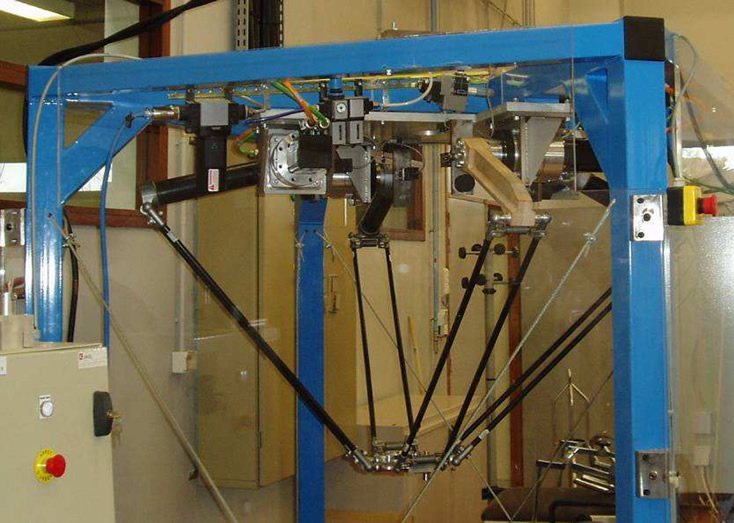
Fig. 7. Prototype of an industrial parallel robot in which one link has been replaced by a wooden element.
Thus, wood is never used in critical parts ensuring accuracy of machines. The reason is given below. A recent attempt to introduce wood in industrial robot manufacture was presented in [2] (Fig. 7). The results showed that the approach was valid enough to compete with usual materials. However, this study missed two crucial issues: The wood performance / dimensions will vary with the atmospheric conditions / external solicitations and with the conditions they have grown; thus, new robot design issues appear: How to be sure that the design process is robust wrt wood variability, i.e. that a robot made with wood can be accurate, stiff, etc., even if wood properties vary? Moreover, at equal stiffness, most of wood types are heavier than carbon: How to the lower energy consumption associated with moving the robot? Robotic companies do not trust in wood. How prove them that wood are good materials for robot design? The goal of RobEcolo is to show that industrial wooden robots could be a good alternative to metallic industrial robots, despite these two aforementioned issues.
References
[1] Fizians Environnement "Eco-design of two types of robots: KUKA 270 and IRSbot-2", 2014.
[2] T. Laurent et al., “Eco-conception: Vers un Robot en Bois” (in French), Technologie, 168, 2010.
[3] A. Roennau et al. “Design and Kinematics of a Biologically-Inspired Leg for a Six-Legged Walking Machine,” Int. Conf. Biomed. Rob. & Biomech, 2010.
[4] https://www.youtube.com/watch?v=VA-bFrxR-XU
[5] http://www.robotgarden.org/what-is-a-robotics-hackerspace/
Methodology, results and prototypes
Within RobEcolo, we are going to prove that it is possible to design a wooden industrial robot which has performance (in terms of accuracy and stiffness) equivalent to those of standard industrial robot. The challenge is to design a robot (with a size similar to the SCARA TP80 FastPicker of Staübli, with repeatability lower than 500 µm and a deformation under a payload of 1 kg lower than 500 µm), and this even is the wood properties / dimensions vary.
To reach these goals, we are going to develop robust design algorithms that will take into account the variability of the wood performance and that will allow the definition of robot architectures for which the impact of this variability is minimal. For using these algorithms, it will be necessary to define models for the characterization of the robot deformations, models which do not exist for wooden robots and which must be created. Moreover, in order to ensure the accuracy even of the dimensions of the wooden links may vary with the atmospheric conditions, we are going to use sensor-based controllers. The sensors involved in these controllers will observe elements of the robots as close as possible from the end-effector. The use of these sensors may impact the robot performance, and we will take into account this potential impact at the beginning of the design phase. Finally, all theoretical results will be obtained on a prototype of wooden robot that will be designed during the project.
Following this methodology, the following results have been obtained:
- The integration of elastic models of wood (which is an anisotropic material, whose performance varies) in elastic models of robots
The variability of wood properties leads to a major problem which is the impossibility of knowing with certainty in advance the dynamic and elastic performances of the robot. In order to overcome this problem, several scientific or technological axes have been explored, among which : (i) use special woods (ex : Accoya) or wood composites that have better stability than raw wood, (ii) find an appropriate chemical (or other) treatment (a compromise between stability and pollution must be sought), (iii) find a shape adapted to the wooden elements of the robot (using geometric or topological optimization techniques that will have to be adapted to the fact that the wood is an anisotropic material). Whatever the results obtained in each of its axes, the modelling of wood material has to meet strong constraints in terms of the precision ratio of the results to the numerical cost of the calculation. There are extremely fine models for modelling the complex behaviour of wood, such as viscoelasticity in orthotropic environments (creep problems), shrinkage/swelling due to mechanical absorption or water state within sections (all mechanical characteristics are strongly correlated with moisture content). At present, these models are only studied on a small scale (of the order of a few centimetres), and are a priori too heavy to be adapted to the scale of a robot part of the order of ten centimetres. Our problem consisted in identifying to what scale of modeling it is necessary to go to model with the desired precision the behavior of a robot part.
|
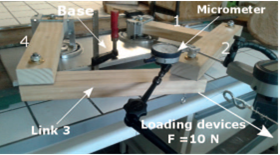
Fig. 1. Example of intermediary mockup. |
|
|
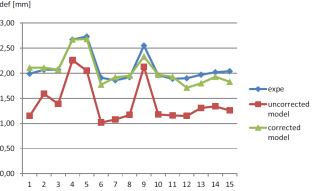
(a) Deformations along z, loading along the same direction with a payload of1 kg, 15 configurations in the workspace |
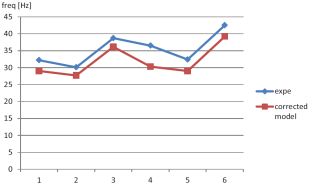
(b) First natural frequency, 6 configurations in the workspace |
Fig. 2. Comparison between simulations and experimentation results for wood model characterization |
|
First of all we tried to select a suitable type of wood for the realization of our robot. We chose Accoya, a very dimensionally stable acetylated wood whose mechanical and swelling properties are poorly controlled. So we started by working on the experimental characterization of these performances:
+ Determination of water and thermal expansion coefficients (specific distinction due to acetylation of wood)
+ Determination of the rigidity of acetylated wood (pine and beech)
We then developed an intermediate model based on the modeling of modified Bernoulli beams combined with structural matrix assembly techniques and stochastic Monte-Carlo approaches (to allow the characterization of the dispersion of results related to significant variations in the mechanical properties of wood). The change appears in the value of the longitudinal Young's modulus which is weighted by a coefficient which reflects the loss of stiffness of the wooden beams in the joints (local weakening phenomenon linked to the holes and complex to calculate due to the scale and stress distribution in a non-homogeneous and orthotropic material). The coefficients depend on laws that have been identified and verified experimentally.
The simulation results were compared with experimental results on intermediate robot models (Fig. 1) which show the relevance of our approach (Fig. 2 - prediction errors less than 10%).
- The definition of robust design techniques allowing to guarantee for the robot created the minimization of the effects due to the variability of the wood performances
The variability of wood properties has led us to develop a robust design process based on the use of topological optimization algorithms that are used to optimize the shape of the bodies of a mechanical structure.
These algorithms are very little used in robot design because they are based on a complete and refined finite element modeling of the system leading to very long computation times to estimate the deformations and vibrations of the robot. Moreover, a robot having a behavior that evolves according to its configuration, it is usually necessary to rebuild the system for each configuration, which is a huge waste of time.
We have proposed a methodology capable of carrying out the topological optimization of a robot, optimization valid globally in the workspace or for a given set of trajectories, and which is based on the use of "engineer-oriented" performance indices. To minimize the computation time associated with estimating robot performance for all workspace configurations, we :
1. exploited the structure of elastic models in order to reduce their complexity through an intelligent use of model reduction techniques.
2. optimized the areas of the workspace or the trajectories for which the worst performances are supposed to be obtained
By applying this method to a case study, the five-bar mechanism (which we are developing as part of RobEcolo), we have shown the computational efficiency of our method (Fig. 3).
This method was then extended by introducing probabilistic performance indices taking into account the variability of the mechanical behaviour of the wood in order to achieve a robust topological optimization of our robot.
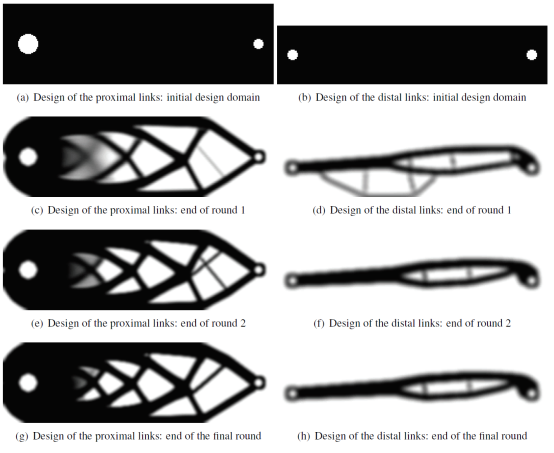
Fig. 3. Topology optimization of the links of the five-bar mechanism design in the scope of RobEcolo.
- Definition of control-based design techniques
Knowing that there are singularities in the interaction models used in visual servoing, singularities that impact the final precision of robots, requires revisiting the design methodologies of robots controlled by the use of external sensors.
Something completely unusual is to realise that the hidden robot concept mentioned in the previous paragraph can be used to rethink the robot design process: this concept can lead to the definition of "control oriented" performance indices that can be used in the design phase to obtain the best possible performance in terms of positioning accuracy.
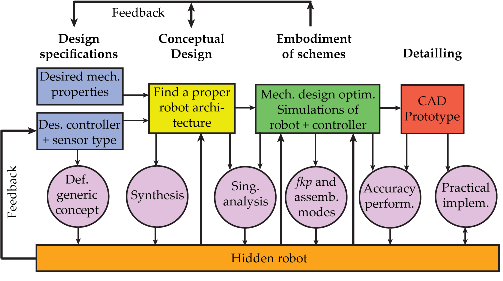
Fig. 4. How the concept of hidden robot allows to design robots taking into account constraints of the controller
Fig. 4 illustrates the proposed new design methodology. If, for a given application, it is specified that the robot must be controlled using external sensors that observe certain bodies, the designer should be aware that such a specification leads to the definition, for any type of robot architecture, of a generic hidden robot concept. Thus, in the preliminary design phase, for each robot architecture, the corresponding hidden robot model can be defined and its singularities analyzed. A feedback can therefore be given to the designer so that he can choose, for example, the robot architectures with the least singular configurations. If, for any reason, all hidden robots are architecturally unique, the design specifications for the use of a given sensor type or the definition of the robot elements to be observed must be modified (by proposing other sensors or other elements to be observed). Then, once the potential architectures have been selected, they must be optimized in the advanced design phase. More detailed kinematic models for real robots and robots hidden in the controller are defined and used to extract performance indices (e.g. precision), define a controller, and simulate robot behavior. If the results do not match the specifications, the previous design steps should be reviewed. Finally, during the implementation of the controller on the manufactured robot, the hidden robot equations must be implemented.
It was this type of design methodology that led us to define the optimal dimensions of RobEcolo's five-bar prototype mechanism.
- The creation of a prototype of an industrial wooden robot
All the modelling and design results have led to the production of the RobEcolo prototype (Fig. 5) which we received at the beginning of October 2017 and which is in the start-up phase.

Fig. 5. RobEcolo prototype
Papers associated with the project RobEcolo (list established in April 2018)
International journal papers (accepted)
[J1] S. Briot, F. Chaumette, and P. Martinet, “Revisiting the determination of the singularity cases in the visual servoing of image points through the concept of “hidden robot”,” IEEE Transactions on Robotics, 2017, Vol. 33, No. 2.
[J2] S. Briot, P. Martinet, and F. Chaumette, “Singularity Cases in the Visual Servoing of Three Image Lines,” IEEE Robotics and Automation Letters, 2017, Vol. 2, No. 2, pp. 412-419
[J3] S. Briot and A. Goldsztejn, “Topology Optimization of Industrial Robots: Application to a Five-bar Mechanism,” Mechanism and Machine Theory, 2018, Vol. 120, pp. 30-56.
International journal papers (under writing)
[J4] S. Briot, P. Martinet, and F. Chaumette, “New Results on the Singularity Cases when Observing Four Image Points,” International Journal of Computer Vision
[J5] L. Kaci, C. Boudaud, and S. Briot, “Elastic Modelling of a Wooden Robot,” European Journal of Wood and Wood Products
Communications (accepted)
[C1] L. Kaci, S. Briot, C. Boudaud and P. Martinet. “Control-based Design of a Five-bar Mechanism”. Proceedings of the 6th European Conference on Mechanism Science (EuCoMeS2016). Nantes, France, September 2016. Finalist of the Best Student Paper Award.
[C2] S. Briot, F. Chaumette, and P. Martinet, “Revisiting the determination of the singularity cases in the visual servoing of image points through the concept of “hidden robot”,” Proceedings of 2017 IEEE International Conference on Robotics and Automation (ICRA 2017), May 29 - June 3, 2017, Marina Bay Sands Convention Centre, Singapore.
[C3] S. Briot, P. Martinet, and F. Chaumette, “Singularity Cases in the Visual Servoing of Three Image Lines,” Proceedings of 2017 IEEE International Conference on Robotics and Automation (ICRA 2017), May 29 - June 3, 2017, Marina Bay Sands Convention Centre, Singapore.
[C4] S. Briot and A. Goldsztejn, “Topology Optimization of a Reactionless Four-bar Linkage,” Proceedings of the 7th IFToMM International Workshop on Computational Kinematics (CK2017), May 22-24, 2017 Futuroscope-Poitiers, France.
[C5] L. Kaci, C. Boudaud, S. Briot, P. Martinet, “Elastostatic Modelling of a Wooden Parallel Robot,” Proceedings of the 7th IFToMM International Workshop on Computational Kinematics (CK2017), May 22-24, 2017 Futuroscope-Poitiers, France.
[C6] L. Kaci, S. Briot, C. Boudaud and P. Martinet. “Topology Optimization of a Wooden Industrial Robot”. Proceedings of the 22nd CISM IFToMM Symposium on Robot Design, Dynamics and Control, June 25 - 28, 2018, Rennes, France.
[C7] L. Kaci, S. Briot, C. Boudaud and P. Martinet. “RobEcolo: Optimal Design of a Wooden Five-bar Mechanism”. Proceedings of the ASME 2018 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference (IDETC/CIE 2018), August 26-29, 2018, Quebec City, Canada.
Textbook chapters (to appear)
[O1] S. Briot “Eco-conception en Robotique”. Les Techniques de l’Ingénieur.
Workshops (accepted)
[W1] L. Kaci “Design of an Industrial Wooden Robot”. Journées des Jeunes Chercheurs en Robotique (JJCR 2017). Biarritz, France, November 2017. Award of the best oral presentation.
[W2] C. Boudaud, S. Briot, L. Kaci, P. Martinet. « Design of an Industrial Wooden Robot », 6èmes Journées scientifiques du GDR Sciences du Bois, Nantes, novembre 2017. Award of the Best Poster Presentation.
[W3] C. Boudaud, S. Briot, L. Kaci, P. Martinet. « RobEcolo : Conception de Robots industriels à base de matériaux à faible impact Ecologique », 5èmes Journées scientifiques du GDR Sciences du Bois, Bordeaux, novembre 2016.
[W4] L. Kaci, S. Briot, C. Boudaud, P. Martinet “Design of an Industrial Wooden Robot”. Journées Nationales de la Recherche en Robotique (JNRR 2017). Biarritz, France, Novembre 2017.
Plenary conferences, seminars
[S1] S. Briot, "RobEcolo: Design of a Wooden Industrial Robot," Seminar at Institut Pascal, Nov. 16, 2017, Aubière, France (invited talk).
[S2] S. Briot, "Etat de l'art en Éco-Conception de Robots," Journées Nationales de la Recherche en Robotique, Nov. 8, 2017, Biarritz, France (invited talk)