Configurations de mannequin
La fatigue physique dans les activités professionnelles conduit à des risques éventuels de troubles musculo-squelettiques (TMS). Les recherches en ergonomie ont pour objectif la prévention des risques potentiels. Ainsi, la simulation de mannequins virtuels a été beaucoup utilisé dans l’industrie, afin d'examiner les facteurs humains et l'ergonomiques dès que possible. Cependant, l'effet de la fatigue n'est pas encore suffisamment considéré ni dans les analyses ergonomiques conventionnelles, ni dans les outils de simulation. Actuellement, nous nous concentrons sur la modélisation de la fatigue et la récupération musculaire dans les opérations de manutention manuelles, et ses applications potentielles, et l'intégration de ses effets dans les évaluations des opérations et des outils de simulation.
Dans un premier temps, nous avons proposé un modèle simplifié de la fatigue musculaire en utilisant des paramètres physiologiques pour prédire la réduction de la force physique dans les opérations de manutention. Puis, nous avons réalisé une approche théorique et une approche expérimentale pour valider ce modèle. Pour la première approche, des comparaisons ont été faites entre notre modèle et les modèles d’endurance pour des cas statiques et des cas dynamiques. De l'analyse théorique, la résistance à la fatigue pour un groupe de muscles d'une certaine population ne peut être déterminée par la méthode de régression. Pour la deuxième approche, 40 ouvriers ont effectué la simulation d'opérations de perçage sous contraintes posturales. Outre le processus de travail, les forces exercées par les ouvriers dans la simulation des perçages ont été mesurées comme un indice de la fatigue physique, et la posture des membres supérieurs a également été mesurée grâce à un système de capture de mouvements. Il a été constaté que la fatigue de la plupart des sujets a suivi la fonction exponentielle prédite par le modèle de la fatigue. Enfin, le modèle de fatigue a été implémenté dans notre logiciel de la simulation de mannequin pour évaluer des opérations manuelles et faire de la prédiction de postures de travail avec une méthode d'optimisation multi-objectifs.
Le problème d'accessibilité par des mécanismes ou des mannequins à grand nombre de degrés de liberté en environnement encombré est impossible à résoudre avec l'ensemble des méthodes connues de génération de trajectoire, qu'elles soient déterministes ou stochastiques, locales, globales ou mixtes. L'approche multiagent appliquée à ce problème a permis d'apporter une solution efficace qui intègre, dans un même univers multi-agent, la contribution du concepteur humain.
Nous avons aussi abordé la question de l'intégration de "comportements" réalistes du mannequin. Ces comportements réalistes se fondent sur la prise en compte de critères posturaux issus de l'ergonomie. Notre démarche s’inscrit dans le cadre d’un modèle de type réalité virtuelle. Ce travail, initié dans le cadre du projet européen EnHance et d'une thèse CIFFRE avec la société SNECMA, se poursuit aujourd’hui avec le CEA et le CCR d'AIRBUS dans le cadre de la thèse d'Antoinne Rennuit.
Pour définir un "comportement" réaliste du mannequin, une autre approche basée sur la capture de mouvements est utilisée. En couplant cette méthode à des outils algorithmiques, nous pourrons immerger un opérateur dans un environnement virtuel afin qu'il puisse valider l'accessibilité d'objets autour de lui. Cette immersion pourra se faire en modifiant "l'échelle" de la personne immergée afin de tester l'ergonomie et l'accessibilité visuelle d'un panel plus important de personnes.
L’introduction de robots d’architecture parallèle dans l’industrie demande la mise au point d’outils capables de prendre en compte ces nouvelles cinématiques dans les logiciels de CAO-Robotique (volume de travail, programmation hors-ligne de trajectoires) et intégration de périphériques haptiques pour le déplacement des objets, des robots et des mannequins. Un travail de collaboration sur ce sujet a débuté avec la société Tecnomatix qui commercialise le logiciel de CAO-Robotique ROBCAD ou eM-Workplace (application au robot FANUC F200i et intégration du périphérique Phantom dans ROBCAD ou eM-Workplace).
Nous avons aussi intégré des outils permettant de caractériser le comportement d'un mécanisme en transformant des propriétés cinématiques du mécanisme en phénomène physique. Ainsi, l'effecteur d'un robot peut vibrer lorsqu'il s'approche d'une configuration singulière ou son déplacement devenir de plus en plus difficile au voisinage de la frontière de son espace de travail. On définit ainsi des zones dans l'espace de travail où les mouvements de l'outil sont plus difficiles ce qui peut suggérer à l'utilisateur de déplacer sa trajectoire.
Mécanisme parallèle 5 barres et son espace de travail pour un mode de fonctionnement donné avec en rouge des zones plus proches des configurations singulières.
Les activités humaines peuvent être analysées soit par simulation virtuelle soit par simulation réel. Dans le premier cas, un mannequin digital réalise les tâches et des indices provenant des études d’ergonomie permettent de calculer des résultats partiels. Dans le deuxième cas, des humains réalisent les tâches et des experts en ergonomie analysent les mouvements afin de qualifier la fatigue.
Le but de notre travail est de créer une liste d’indicateurs permettant la quantification du stress, charge de travail et fatigue et de les comparer avec la réalité, afin d’affiner les modèles.
Ce travail est réalisé dans le cadre d'une contrat entre l'Université de Tsingua (Prof. Zhang Wei, Virtual Reality & Human Interface Technology Lab), le centre commun de recherche d'EADS (Techno'Campus) et l'IRCCyN.
Nous avons développé un nouveau modèle de muscle
permettant de prendre en compte la fatigue musculaire. Ce modèle
est couplé à un modèle dynamique pour permettre
une estimation des efforts et des couples générés
par chaque articulation.
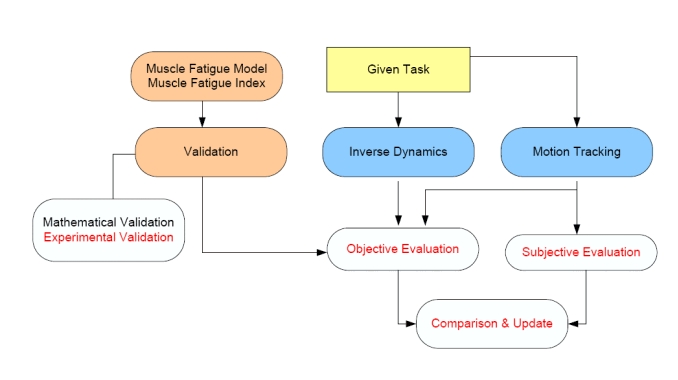
Objectifs du projet EADS/Tsinghua/IRCCyN.