 Architecture de l’Orthoglide et son espace de travail
Architecture de l’Orthoglide et son espace de travail L’usinage à grande vitesse ou l’assemblage de précision réclament des propriétés que les architecture sérielles ne peuvent plus toujours offrir. Les machine-outils classiques doivent être massives pour augmenter leur rigidité. Elles souffrent alors d’inerties très importantes qui limitent leurs performances dynamiques. Les architectures cinématiques parallèles permettent de limiter les masses en mouvement mais compliquent les relations d’entrées-sorties et présentent des pertes de rigidité au voisinage de singularités. De plus, ces architectures ont un espace de travail de forme complexe où les performances varient beaucoup d’un point à l’autre et d’une direction à l’autre en un point donné, ce qui est néfaste pour l’usinage.
Pour pallier ce problème, nous développons des critères de conception centrés sur l’isotropie de la matrice jacobienne et sur les facteurs de transmissions des vitesses et des efforts. La mise en œuvre de ces critères dans la conception de mécanismes parallèles conduit à des architectures comme le projet Orthoglide qui permet de concilier les avantages des mécanismes sériels et parallèles, ou le projet Anguille dans lequel chaque vertèbre est réalisée à l'aide d'un mécanisme parallèle.
Cette architecture à trois degrés de liberté en translation a de nombreuses applications potentielles en usinage rapide ou en assemblage de précision. Nous travaillons sur des versions à 5 et 6 degrés de liberté (brevet en cours). Ces travaux s’effectuent dans le cadre d’un projet national ROBEA du CNRS (projet MAX puis MP2).
Pour définir le placement des actionneurs ainsi que leur course, nous étudions l'évolution des facteurs d'amplification de vitesse (FAV) sur la droite Q1Q2. Nous avons aussi défini la notion d'espace dextre régulier (EDR) qui permet de faire le lien entre la conception et la finalité de notre machine parallèle. Un EDR peut être de forme cubique, cylindrique ou sphérique.
Plusieurs stratégies de conception ont été proposées pour définir les dimensions de l'Orthoglide en appliquant les contraintes sur les FAV sur l'espace de travail complet ou seulement sur son espace dextre régulier.
Évolution du conditionnement sur la droite Q1Q2 de l'espace de travail régulier.
Comparaison entre le volume de l'espace dextre et le volume de l'espace de travail.
Modèle de rigidité d'une jambe et l'expression de la matrice de raideur à l'isotropie
Une étude de la sensibilité de l'Orthoglide aux erreurs de fabrication (longueur des barres et orientation des articulations) a été réalisé dans le cadre du projet ROBEA MPP. Nous avons pu ainsi démontrer que la configuration isotrope est la configuration la moins sensible aux erreurs de fabrication.
Dans le cadre du projet Robea Anguille, nous travaillons sur la mise en œuvre d’architectures cinématiques parallèles pour la réalisation des vertèbres. Pour mimer la nage des anguilles, nous recherchons la cinématique permettant la réalisation de la nage ainsi que des changements de direction tel que la plongée. Les contraintes d'encombrement sont aussi pris en compte afin de faciliter la miniaturisation de nos vertèbre et l'utilisation de moteurs électriques. Pour améliorer la portance de l'anguille, sa section le long de son corps entre la tête et la queue est elliptique.
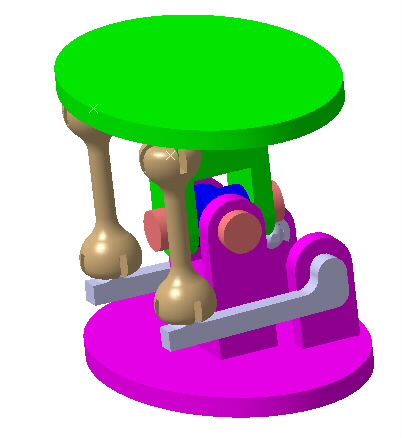
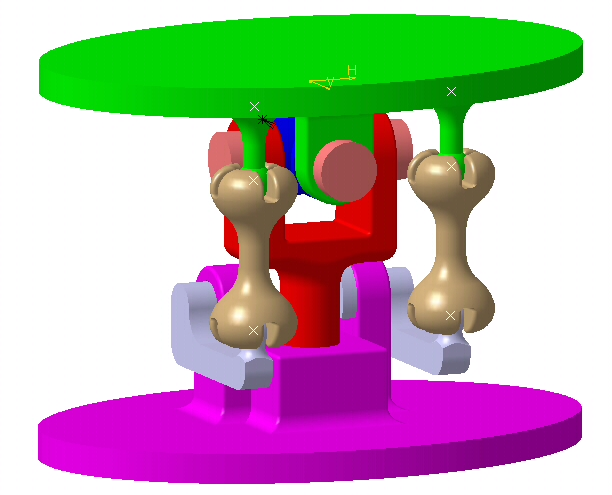
Modèles CAO d'une vertèbre d'anguille à 2 ou 3 degrés de liberté
Dans les deux cas, le mouvement de nage est réalisé à l'aide de deux moteurs qui produisent, simultanément, le même mouvement selon le principe du différentiel.

Pour plus d'informations, consulter le site WEB du projet Projet ROBEA Anguille
Pour valoriser notre brevet (Brevet français FR2850599), nous allons réaliser un prototype de faisabilité. La société Symétrie vient de réaliser l'étude technique qui va nous permettre de réaliser ce prototype.
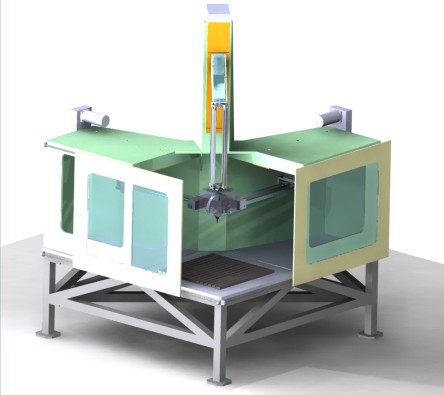
Modèle CAO du prototype de l'Orthoglide 5 axes réalisé par Symétrie pour l'IRCCyN
Dans le cadre du projet européen NEXT, nous étudions la rigidité de la partie parallèle d'un prototype construit par IFW.
Modèle CAO du prototype d'IFW et son maillage
À partir d'une analyse par éléments finis, nous avons montré que l'influence de la gravité pouvait s'assimiler à un déplacement constant suivant l'axe Z, de l'autre de 40 microns. Cependant, dans les autres directions, nous avons entre -5 et +5 microns de déplacement. Nous avons aussi réalisé une analyse modale et proposé des modifications sur les membrures pour changer le premier mode.
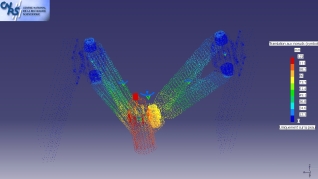
Déplacement de l'outil sous l'influence de la gravité et analyse modale