AMARSMER - Control of an underwater drone with steering thrusters
2024-2027 ISBlue, Carnot MERS, Carnot ARTS
with ENIB and Lab-STICC
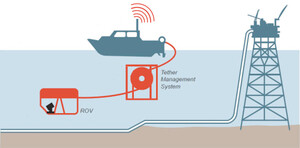
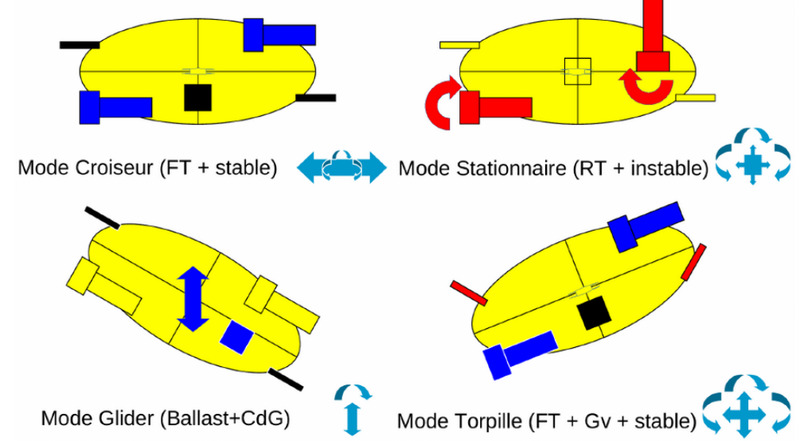
AMARSMER is a project on robot control, where we consider a ROV with steering thrusters. The goal is to compare the behavior and performance when using model-based and data-based controllers on such systems.